
Written by Michael Zargham
Some Definitions and References for terms I used frequently

Preamble: Today like most days, I was throwing around phrases like bio-mimetic system and multi-mechanism differential game.These words have meanings beyond their buzzword value and I realize those meanings are often lost to listeners. Below is a quick attempt define them publicly, and to provide basic references.
Non-Linear System
a system in which the change of the output is not proportional to the change of the input. Nonlinear problems are of interest to engineers, biologists, physicists, mathematicians, and many other scientists because most systems are inherently nonlinear in nature. Nonlinear dynamical systems, describing changes in variables over time, may appear chaotic, unpredictable, or counterintuitive, contrasting with much simpler linear systems.
Source:
https://en.wikipedia.org/wiki/Nonlinear_system
Further Reading:
https://inst.eecs.berkeley.edu/~ee222/sp18/ https://stanford.edu/class/ee363/lectures.html
Differential Equation
a mathematical equation that relates some function with its derivatives. In applications, the functions usually represent physical quantities, the derivatives represent their rates of change, and the equation defines a relationship between the two. Because such relations are extremely common, differential equations play a prominent role in many disciplines including engineering, physics, economics, and biology.
In pure mathematics, differential equations are studied from several different perspectives, mostly concerned with their solutions — the set of functions that satisfy the equation. Only the simplest differential equations are solvable by explicit formulas; however, some properties of solutions of a given differential equation may be determined without finding their exact form.
Source: https://en.wikipedia.org/wiki/Differential_equation
Event Driven Differential Equation
a set of Differential equations with actions at discrete events are used to model piecewise differential equations with jump discontinuities, or impacts and collisions such as a bouncing ball. They can also model hybrid systems with both continuous and discrete dynamics. The discrete dynamics can come from sampled or digital processes, such as a digital controller controlling a continuous process, or the discrete dynamics can represent modes such as a chemical reactor following a recipe.
Source:
https://reference.wolfram.com/language/guide/DifferentialEquationsWithEvents.html
Hybrid System
a dynamical system that exhibits both continuous and discrete dynamic behavior — a system that can both flow (described by a differential equation) and jump (described by a state machine or automaton). Often, the term “hybrid dynamical system” is used, to distinguish over hybrid systems such as those that combine neural nets and fuzzy logic, or electrical and mechanical drivelines. A hybrid system has the benefit of encompassing a larger class of systems within its structure, allowing for more flexibility in modeling dynamic phenomena.
In general, the state of a hybrid system is defined by the values of the continuous variables and a discrete mode. The state changes either continuously, according to a flow condition, or discretely according to a control graph. Continuous flow is permitted as long as so-called invariants hold, while discrete transitions can occur as soon as given jump conditions are satisfied. Discrete transitions may be associated with events.
Source:
https://en.wikipedia.org/wiki/Hybrid_system
Further Reading:
http://www-inst.cs.berkeley.edu/~ee291e/sp09/handouts/book.pdf
Differential Game
In game theory, differential games are a group of problems related to the modeling and analysis of conflict in the context of a dynamical system. More specifically, a state variable or variables evolve over time according to a differential equation. Early analyses reflected military interests, considering two actors — the pursuer and the evader — with diametrically opposed goals. More recent analyses have reflected engineering or economic considerations.
Differential games are related closely with optimal control problems. In an optimal control problem there is single control u(t) and a single criterion to be optimized; differential game theory generalizes this to two controls u(t),v(t) and two criteria, one for each player. Each player attempts to control the state of the system so as to achieve its goal; the system responds to the inputs of all players.
Source:
https://en.wikipedia.org/wiki/Differential_game
Hybrid Differential Games
combine differential games with hybrid games. In both kinds of games, two players interact with continuous dynamics. The difference is that hybrid games also provide all the features of hybrid systems and discrete games, but only deterministic differential equations. Differential games, instead, provide differential equations with input by both players, but not the luxury of hybrid games, such as mode switches and discrete or alternating interaction. This paper augments differential game logic with modalities for the combined dynamics of differential hybrid games. It shows how hybrid games subsume differential games and introduces differential game invariants and differential game variants for proving properties of differential games inductively.
Source: https://dl.acm.org/citation.cfm?id=3091123
Further Reading:
https://core.ac.uk/download/pdf/6313269.pdf
Multi-Player Differential Game
Game theory is the study of decision problems in which there are multiple decision makers, and the quality of a decision maker’s choice depends on that choice as well as the choices of others. While game theory has been studied predominantly as modeling paradigm in the mathematical social sciences, there is a strong connection to control systems in that a controller can be viewed as a decision-making entity. Accordingly, game theory is relevant in settings in which there are multiple interacting controllers
Source: https://www.ece.ucsb.edu/~jrmarden/files/marsha2017.pdf
A Multi-Player is a differential game in which there are n controllers representing individual stakeholders and/or groups of stakeholders acting with independently modeled goals or object functions defined over the system state and their actions.
In the literature many multi-player differential games are simply collapsed into two player differential games in order to reduce complexity; this is often done by collapsing agents into cartels or subpopulations cooperating to optimize a shared objective. In practice, multi-stakeholder ecosystems require multi-player differential games to adequately captured interaction effects between their respective strategies.
Source: Self
Further reading:
https://books.google.com/books?id=F8NNYgv7FKAC&source=gbs_navlinks_s
Multi-Mechanism Differential Game
a differential game in which there is more than one mechanism through which the players may affect the state of the game. Multi-mechanism differential games are generally Hybrid Differential games because strategies must include decision over which set of mechanism two employ which are almost require discrete switching policies.
When considering equilibria multi-mechanism games, it does not suffice to consider the mechanisms stability independently as there are well known results in hybrid systems that indicate that two stable systems composed under a switching policy can be driven unstable.
Source: Self
Further Reading: https://econweb.ucsd.edu/~jsobel/Papers/StrategicStabilitySignaling.pdf
https://www.sciencedirect.com/science/article/pii/S1474667017357658
Subpopulation Models
In Computational Biology:
Due to the ubiquity of structured population heterogeneity, the analysis of subpopulation characteristics and causal differences between subpopulations is crucial for a holistic understanding of biological processes.
Source:
https://journals.plos.org/ploscompbiol/article/file?id=10.1371/journal.pcbi.1003686&type=printable
In Public Infrastructure and Social Systems:
We extend this model to a metapopulation framework in which large subpopulations (i.e., cities) are represented as nodes in a metagraph whose links represent the transportation infrastructure connecting them (i.e., roads)
Source:
https://arxiv.org/pdf/1308.3793.pdf
Further Reading:
https://books.google.com/books?id=pZH6AQAAQBAJ&dq=stability+of+hybrid+games&source=gbs_navlinks_s
Policy or Dynamic Strategy
A state dependent policy or a dynamic strategy is a mathematical characterization of the way an agent or subpopulation makes decisions in a differential game. In its general form, this can be expressed as the the argument of a utility maximization over some time horizon, though in practice it may be best defined using heuristics.
Interpreting behavior as strategic with respect some unknown private optimization objective is a method for inferring behavior models from data without resorting to restrictive assumptions about rationality with respect to some global objective such as profit maximization.
Source: self
Further Reading:
http://web.mit.edu/dimitrib/www/dpchapter.htm
lhttp://www.mit.edu/~modiano/papers/C85.pdf
https://pdfs.semanticscholar.org/367d/57a493b5768ba9ae711a0efd82bba8691d9f.pdf
Bio-Mimetic System and Bio-Inspired Design
Biomimetics or biomimicry is the imitation of the models, systems, and elements of nature for the purpose of solving complex human problems.
Source:
https://en.wikipedia.org/wiki/Biomimetics
Bionics or biologically inspired engineering is the application of biological methods and systems found in nature to the study and design of engineering systems and modern technology.
In the field of computer science, the study of bionics has produced artificial neurons, artificial neural networks, and swarm intelligence. Evolutionary computation was also motivated by bionics ideas but it took the idea further by simulating evolution in silico and producing well-optimized solutions that had never appeared in nature.
Source:
https://en.wikipedia.org/wiki/Bionics
Natural systems have had a great deal of theoretical modeling and empirical validation; as a result they serve as ideal starting points when attempting to create differential equations, and differential games models with well defined analytical and emergent properties. Systems are often hybrid dynamical systems, with spatially distributed distributed state, and well-modeled multi-agent view at both the individual and subpopulation levels.
Source: Self
Separation of Time Scales
the idea of time-scale separation, in which part of a system is assumed to be operating sufficiently fast compared to the rest that it may be assumed to have reached a steady state. This allows, in principle, the fast components to be eliminated, resulting in a simplified description of the system’s behavior.
Source:
https://www.ncbi.nlm.nih.gov/pmc/articles/PMC3991559/
Thus, traditionally, there were three aspects of a system: fine scale, dynamic, and fixed. A glass of water on a table with an ice cube in it might be treated by considering the movement and melting of the ice cube, the average over molecular vibrations, and the fixed structure of the glass. At longer time scales, the water will evaporate, the glass will flow, the table may rot, but this is not important at a particular scale (or a range of scales) of observation.
Source:
https://necsi.edu/why-complexity-is-different
Engineering Design
a methodical series of steps that engineers use in creating functional products and processes. The process is highly iterative — parts of the process often need to be repeated many times before another can be entered — though the part(s) that get iterated and the number of such cycles in any given project may vary.
…It is a decision making process (often iterative) in which the basic sciences, mathematics, and engineering sciences are applied to convert resources optimally to meet a stated objective. Among the fundamental elements of the design process are the establishment of objectives and criteria, synthesis, analysis, construction, testing and evaluation.
— ABET
One framing of the engineering design process delineates the following stages: research, conceptualization, feasibility assessment, establishing design requirements, preliminary design, detailed design, production planning and tool design, and production.
The steps tend to get articulated, subdivided, and/or illustrated in different ways, but they generally reflect certain core principles regarding the underlying concepts and their respective sequence and interrelationship.
Source:
https://en.wikipedia.org/wiki/Engineering_design_process
Abstractions and Mathematical Models
a conceptual process where general rules and concepts are derived from the usage and classification of specific examples, literal (“real” or “concrete”) signifiers, first principles, or other methods.
“An abstraction” is the outcome of this process — a concept that acts as a super-categorical noun for all subordinate concepts, and connects any related concepts as a group, field, or category.
Source: https://en.wikipedia.org/wiki/Abstraction
All Engineering Designs are Abstractions; they tend to include both ontological or structural descriptions of things, followed by appropriately mathematical models conforming to those structures. In established engineering disciplines the ontological or structural aspects are often taken as a given, but in emerging engineering disciplines careful attention to ontology and taxonomy is critical prior to the application of mathematical models.
Source: Self
Mathematical models can take many forms, including dynamical systems, statistical models, differential equations, or game theoretic models. These and other types of models can overlap, with a given model involving a variety of abstract structures. In general, mathematical models may include logical models. In many cases, the quality of a scientific field depends on how well the mathematical models developed on the theoretical side agree with results of repeatable experiments. Lack of agreement between theoretical mathematical models and experimental measurements often leads to important advances as better theories are developed.
Source: https://en.wikipedia.org/wiki/Mathematical_model
Hidden and Unobservable States
In control theory, observability is a measure of how well internal states of a system can be inferred from knowledge of its external outputs.
Source: https://en.wikipedia.org/wiki/Observability
hidden refers to the state sequence through which the model passes, not to the parameters of the model
Source: https://en.wikipedia.org/wiki/Hidden_Markov_model
Further Reading:
https://see.stanford.edu/materials/lsoeldsee263/19-observ.pdf
Initial Conditions
In mathematics and particularly in dynamic systems, an initial condition, in some contexts called a seed value, is a value of an evolving variable at some point in time designated as the initial time (typically denoted t = 0).
Source: https://en.wikipedia.org/wiki/Initial_condition
Chaos theory is a branch of mathematics focusing on the behavior of dynamical systems that are highly sensitive to initial conditions. “Chaos” is an interdisciplinary theory stating that within the apparent randomness of chaotic complex systems, there are underlying patterns, constant feedback loops, repetition, self-similarity, fractals, self-organization, and reliance on programming at the initial point known as sensitive dependence on initial conditions.
Source: https://en.wikipedia.org/wiki/Chaos_theory
Reachable States or Configuration Space
A state x1 is called reachable at time t1 if for some finite initial time t0 there exists an input u(t) that transfers the state x(t) from the origin at t0 to x1.
A system is reachable at time t1 if every state x1 in the state-space is reachable at time t1.
Source:
https://en.wikibooks.org/wiki/Control_Systems/Controllability_and_Observability
In classical mechanics, the parameters that define the configuration of a system are called generalized coordinates, and the vector space defined by these coordinates is called the configuration space of the physical system. It is often the case that these parameters satisfy mathematical constraints, such that the set of actual configurations of the system is a manifold in the space of generalized coordinates. This manifold is called the configuration manifold of the system.
Source:
https://en.wikipedia.org/wiki/Configuration_space_(physics)
When working on mechanism design problems associated with differential games it is important to pay attention to both the configuration spaces implied by the mechanisms as well as the system’s sensitivity to initial conditions by evaluating the reachable spaces implied by the mechanisms and the proposed initial conditions without making addition assumptions about the strategies players will adopt.
Source: Self
Boundary Conditions
In mathematics, in the field of differential equations, a boundary value problem is a differential equation together with a set of additional constraints, called the boundary conditions. A solution to a boundary value problem is a solution to the differential equation which also satisfies the boundary conditions.
Boundary value problems arise in several branches of physics as any physical differential equation will have them. Problems involving the wave equation, such as the determination of normal modes, are often stated as boundary value problems. A large class of important boundary value problems are the Sturm–Liouville problems. The analysis of these problems involves the eigenfunctions of a differential operator.
To be useful in applications, a boundary value problem should be well posed. This means that given the input to the problem there exists a unique solution, which depends continuously on the input. Much theoretical work in the field of partial differential equations is devoted to proving that boundary value problems arising from scientific and engineering applications are in fact well-posed.
Source:
https://en.wikipedia.org/wiki/Boundary_value_problem
While most discussions of boundary value problems are focused on partial differential equations and solutions distributed over fields, the concept may be used to define any interactions between an other-wise closed system and its outside-world relatively speaking. Such mathematical formulation help avoid trial equilibrium solutions in models with external driving processes. Many social systems, and mechanism design problems, the external driving processes are stochastic processes which often have relationships to the internal state variables.
For example, a boundary process for a market price of a commodity may be a random variable defining the percent change in a state. Adoption processes, and intervals between discrete events often serve to model boundaries between states inside the model and phenomena outside of the model.
Source: Self
Stochastic Process
In probability theory and related fields, a stochastic or random process is a mathematical object usually defined as a collection of random variables. Historically, the random variables were associated with or indexed by a set of numbers, usually viewed as points in time, giving the interpretation of a stochastic process representing numerical values of some system randomly changing over time, such as the growth of a bacterial population, an electrical current fluctuating due to thermal noise, or the movement of a gas molecule. Stochastic processes are widely used as mathematical models of systems and phenomena that appear to vary in a random manner. They have applications in many disciplines including sciences such as biology, chemistry, ecology, neuroscience, and physics as well as technology and engineering fields such as image processing, signal processing, information theory, computer science, cryptography and telecommunications. Furthermore, seemingly random changes in financial markets have motivated the extensive use of stochastic processes in finance
Source:
https://en.wikipedia.org/wiki/Stochastic_process
Further Reading:
https://ergodicityeconomics.com/lecture-notes/
Lyapunov Function or Generalized Energy Function
In the theory of ordinary differential equations (ODEs), Lyapunov functions are scalar functions that may be used to prove the stability of an equilibrium of an ODE. Named after the Russian mathematician Aleksandr Mikhailovich Lyapunov, Lyapunov functions (also called the Lyapunov’s second method for stability) are important to stability theory of dynamical systems and control theory. A similar concept appears in the theory of general state space Markov chains, usually under the name Foster–Lyapunov functions.
For certain classes of ODEs, the existence of Lyapunov functions is a necessary and sufficient condition for stability. Whereas there is no general technique for constructing Lyapunov functions for ODEs, in many specific cases the construction of Lyapunov functions is known. For instance, quadratic functions suffice for systems with one state; the solution of a particular linear matrix inequality provides Lyapunov functions for linear systems; and conservation laws can often be used to construct Lyapunov functions for physical systems.
Source:
https://en.wikipedia.org/wiki/Lyapunov_function
Lyapunov function may be interpreted as generalized energy functions for arbitrary state space dynamical systems. When doing mechanism design or other systems with digital states whose state transition functions are declared rather than observed, one can start with a Lyapunov function, which the designer considers to be a measure of energy within the system, then constrain the mechanism design to include only state transitions which satisfy Lyapunov’s second method, thus ensuring analytical stability of the resulting system. This method does not prevent external actors from pumping energy into the system, but it does allow energy conservation to be asserted preventing a class of attacks whereby an agent perturbs the state of the system, in order to extract profits from the control action. Agent may still profit from other agents actions in response to the perturbation.
Source: Self
Further Reading:
https://arxiv.org/pdf/1807.00955.pdf
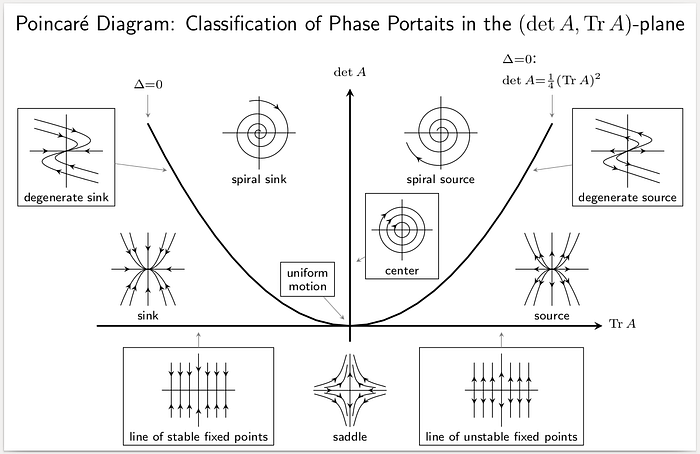
Analytical Stability
In mathematics, stability theory addresses the stability of solutions of differential equations and of trajectories of dynamical systems under small perturbations of initial conditions.
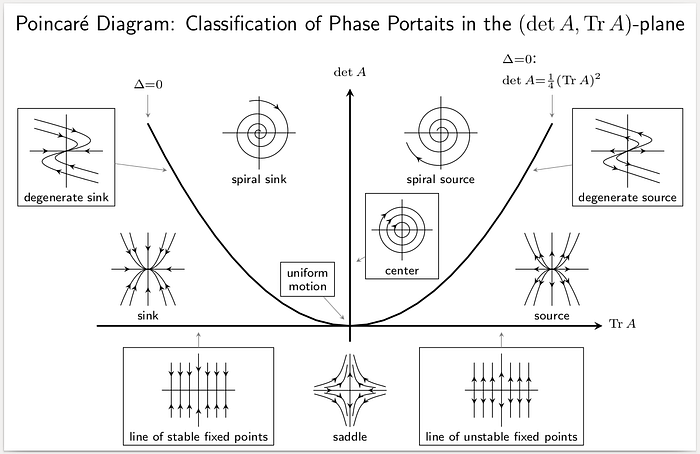
Source: https://en.wikipedia.org/wiki/Stability_theory
Analytical Stability is defined in contrast to the colloquial use of stability to refer to a set of historical observations about a signal which was over the period of observation remaining within some bounds of an apparent equilibrium. Unlike empirical stability, analytical stability implies future stability but does so by leveraging a formal abstraction for which such stability properties may be proven through real analysis. Strong methods for such proofs rely on Lyapunov functions.
Source: Self
Further Reading:
https://en.wikipedia.org/wiki/Lyapunov_stability
About BlockScience
BlockScience® is a complex systems engineering, R&D, and analytics firm. Our goal is to combine academic-grade research with advanced mathematical and computational engineering to design safe and resilient socio-technical systems. We provide engineering, design, and analytics services to a wide range of clients, including for-profit, non-profit, academic, and government organizations, and contribute to open-source research and software development.
