
The term ‘Autonomy’ is a complex concept that often gets muddled due to variations in meaning in different contexts. To unpack and clarify its definition, BlockScience Founder and Chief Engineer Michael Zargham gave a talk on Disambiguating Autonomy in April 2022. Zargham’s talk draws on the book “Anarchist Cybernetics: Control and Communication in Radical Politics” by Thomas Swann to decompose the concept of autonomy and outlines a common language for designing and validating healthy cybernetic organizations.
This post aims to clarify the important and multifaceted concept of autonomy, by breaking it down into two categories and four types of autonomy. We examine these as relational concepts that have tensions and trade-offs and their context in emergent, self-organizing systems such as Decentralized Autonomous Organizations (DAOs).
Autonomy is often defined as freedom from external control or influence. In practice, no person or system is free from external influence. The term is thus helpful to explore the distribution of power among individuals and groups, with an emphasis on where decision-making power is situated and who is impacted by those decisions.
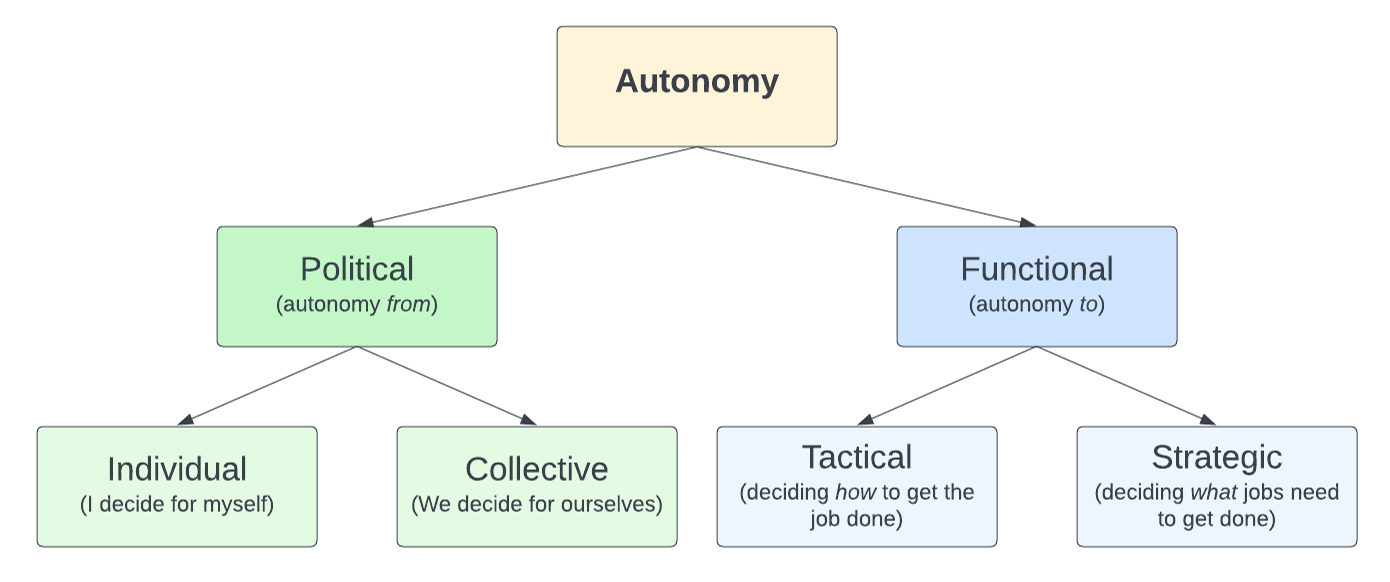
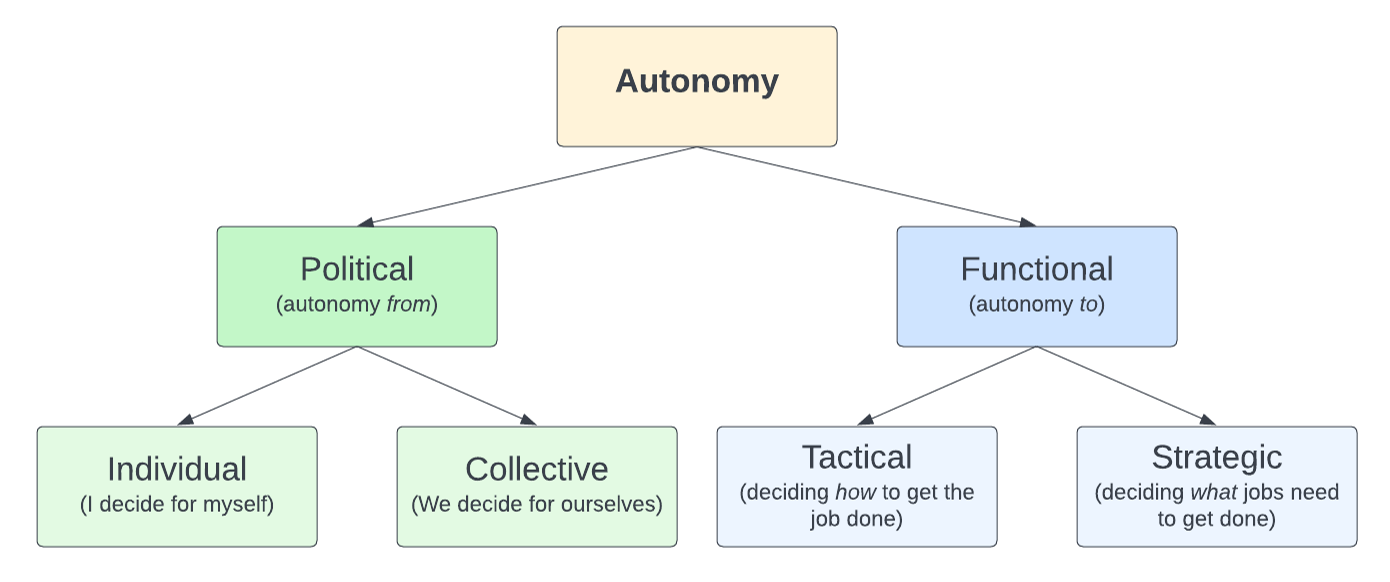
The concept of autonomy can be broken down into two categories: Functional Autonomy and Political Autonomy.
Functional Autonomy is the concept of autonomy that relates to the internal operation of a system, drawn from engineering “autonomous” systems, whereas Political Autonomy is the concept of autonomy as freedom from external political influence, drawn from political science.
Functional Autonomy
Functional Autonomy refers to the degree of flexibility an individual or organization has to respond to complexity pursuant to its goal or function in an operational sense.
Functional autonomy may be described as the autonomy to do something; it relates to cybernetics and systems theory pioneer William Ross Ashby’s concept of variety and relates most directly to the actions an individual or group is capable of taking. Building on Thomas Swann’s analysis, we can further distinguish strategic autonomy - the freedom to set goals from tactical autonomy - the freedom of action required to achieve goals.
This may be seen as an analog of the principal-agent relation where the principal has Strategic Autonomy and the agent has Tactical Autonomy. When it comes to reasoning about functions, goals or purposes of organizations it is important to distinguish the authority to define or refine goals from the degrees of freedom exercised pursuing those goals.
Political Autonomy
In contrast, Political Autonomy refers to an individual or organization’s authority to make its own decisions without interference by external individuals or organizations, and can thus be considered autonomy from outside forces.
This can be confusing because an autonomous organization will nonetheless be made up of constituents with diverse preferences, which can sometimes feel like ‘outsiders’ within the group. Therefore it is common to discuss autonomy as a relationship between actor(s), individual(s) or group(s), navigating the boundaries, constraints and degrees of freedom between them. Relationships within the same scale (individual to individual or organization to organization) are often easier to reason about. For example: when a teenager becomes an adult they gain autonomy from their parents; or when a colony declares independence, it asserts autonomy from the colonizer.
As discussed in Foundations of Cryptoeconomic Systems, a multiscale perspective is required to capture interscale effects in emergent, self-organizing crypto-economic systems. The concepts of Individual Autonomy and Collective Autonomy help us to describe interscale relationships (organization to individual and individual to organization) and their respective trade-offs.
As a member of an organization, an individual accepts a reduction in Individual Autonomy because the organization may place restrictions on those individual’s choices (e.g. make rules or impose processes on the group). What those individuals lose in Individual Autonomy may be offset by an increase in Functional Autonomy; at the group level, they may have actions available that were not available individually. When this group has the freedom to make decisions about how the group will act, according to their own processes, the members of that group have Collective Autonomy.
Coordination amongst a group of individuals towards a shared purpose necessitates holding tension between Individual and Collective Autonomy. Individuals who are coordinating can be considered part of an organization. For “decentralized” organizations, an effective pattern is to associate Collective Autonomy with Strategic Autonomy, where the group sets goals, policies, and an initial social contract or constitution, and Individual Autonomy with Tactical Autonomy, where an individual can decide how to pursue those goals within any constraints being enforced by the organization.
The Relationship between Political and Functional Autonomy
A general example that demonstrates Tactical versus Strategic Autonomy is an autonomous (self-driving) car. The “Autonomous” car has Tactical Autonomy, meaning it can act and make decisions based on its environment. However, the car does not (and should not) have the ability to decide on its destination. The destination should be the decision of the passenger, which means the passenger has Strategic Autonomy.
In the context of cybernetic organizations, Strategic Autonomy is the ability to determine the primary goals of the organization, measurements or indicators for whether that goal has or is being achieved via performance metrics and KPIs, budgeting, compensation and policy making. Policy and rule setting includes but is not limited to, processes enshrined in software such as smart contracts. In the context of DAOs, the organization does so as a group, exercising Collective Autonomy to make key decisions about resource distribution, algorithmic policy or the parameterization of the monetary policy of its cryptocurrency for example.
Once goals have been established by the collective, members of an organization have the freedom to act within the constraints set, and have Tactical Autonomy — the discretion to pursue the group level goals according to their preferences. As long as they keep to the budgets, compensation, performance metrics, and/or rules set forth (some of which may be algorithmically enforced), the member has Individual Autonomy. While over short time horizons members are bound to act within these constraints, there are also mechanisms through which members adapt those constraints in future cycles or seasons.
The exercise of Collective Autonomy to make group-level decisions is Governance, and the application of Individual Autonomy to get things done is Operations.
An organization with governance but no operations can be fun but will not accomplish any achievements. Governance tends to evolve slowly and should provide clear expectations for members, whereas Operations move quickly in order to adapt to changes in the environment.
An organization with operations but no explicit governance structure tends to fall into informal, unacknowledged, and unaccountable implicit governance structures (what is known in feminist literature and parts of web3 as the tyranny of structurelessness) or simply disperse with the fleeting attention of its erstwhile participants. An organization with governance but no operations can be an enjoyable social group but does not actually set or achieve goals — a bit like a community scale “Arm-Chair Philosopher.”
In the case of DAOs, it is also worth noting that it is not a given that all members have a uniform experience of Strategic Autonomy. For example, they may join after rules are set, and may not yet have access or earned the right to participate directly in the change process. The level of inclusivity with regards to collective decision-making varies by organization and there may be different layers of access.
You can read more about this in the example of Lido DAO in our governance assessment of the organization, where some members have “root” access to the DAO to change core rules via code or Strategic Autonomy, while others maintain only Tactical Autonomy. There is no one-size-fits-all organizational configuration, the specific functions an organization aims to fulfill determine what kinds of governance make sense in practice — “in other words, form follows function”, as discussed in An Analysis of Wildland’s “User Defined Organization” Concept.
Applying Cybernetics to Governance Research in Decentralized Systems
In the emerging fields of crypto-economics and token engineering, the notion of a Decentralized Autonomous Organization (or DAO) invokes “Autonomy’’ in a nebulous way.
Disambiguating Autonomy across the political and functional dimensions, as well as the group-level and individual dimensions by acknowledging these different types and functions of autonomy described, provides the language required to navigate important trade-offs in organizational structure — with special attention to distinguishing governance from operations.
While DAOs may be a new web3 concept and the expression and dimensions of autonomy are still being studied, the established field (since the 1940s) of cybernetics offers a valuable lens through which to view these complex systems. Cybernetics is the applied social science of control theory and dynamical systems concerned with “interactions between group-level and individual-level processes, as characterized by purpose-driven systems manifest through self-organization” (Zargham and Nabben 2022). It is a useful field to reason about how to engineer mechanisms and institutions through the construction of rules and is being applied by BlockScience in its work on programmatic mechanism design, as well as governance research and development for emerging self-organizing systems.
In our paper Aligning the Concept of Decentralized Autonomous Organization with Precedents in Cybernetics and previous post Applying Stafford Beer’s Viable System Model (VSM) to Decentralized Organization, we examined the balance (with respect to purpose) of operational efficiency with the concentration of political power. We looked at different scales and determined the goal of decentralized modes of self-organization is operational (Functional Autonomy) and group-level political autonomy (Collective Autonomy). Here, drawing from the book “Anarchist Cybernetics: Control and Communication in Radical Politics” by Thomas Swann, we expounded the two categories and further outlined four types of autonomy and their relational aspects to support more precision and depth in the design and validation of complex systems such as DAOs.
By examining tactical, strategic, individual, and collective Autonomy, how they relate to the existing literature on cybernetics, and how they are expressed in DAOs, we aim to foster more effective dialogue for designing and validating healthy and resilient socio-technical systems.
In doing so, we can acknowledge the depth of the topic and understand the relational aspects and trade-offs that exist when designing and analyzing institutions and the construction of their rules. We look forward to continuing research in this domain, documenting and sharing applied learnings from our work, and collaborating with leading experts to further expand the dialogue and improve systems design and analysis in these new and emerging fields.
Article written by Michael Zargham, Jessica Zartler, Kelsie Nabben, Rika Goldberg and Jeff Emmett with special thanks to Thomas Swann, whose Book Anarchist Cybernetics helped to inform this research, and Eric Alston for his ideas and citations.
Suggested citation: Zargham, M., Zartler, J., Nabben, K., Goldberg, R., Emmett, J., 2023. “Disambiguating Autonomy: Ceding Control in favor of Coordination in Cybernetic Organizing”. Available online: [https://blog.block.science/disambiguating-autonomy/]
About BlockScience
BlockScience® is a complex systems engineering, R&D, and analytics firm, integrating ethnography, applied mathematics, and computational science. We analyze and design safe and resilient socio-technical systems, and with deep expertise in market design, distributed systems, and AI, we provide systems engineering services to a wide range for-profit, non-profit, academic, and government clients.
